Visibility Graph
Keywords: Visibility Graph
최근에 문득 visibility graph에 흥미가 생겼다. 흥미가 동한 이유는 visibility graph의 응용에 대한 글 (또는 포스팅) 은 쉽게 찾을 수 있었던 반면 visibility graph를 효율적으로 생성하는 방법에 대해서는 제대로 정리되어 있는 내용을 찾을 수 없었기 때문이다.
대부분의 기술 블로그와 문헌들은 naive approach를 사용한 visibility graph 생성만을 다루고 있다. 더욱이 놀라운 사실은 그 많은 naive approach들 조차도 정작 구현에 필요한 geometric operation에 대한 설명은 없었다는 점이다. 참으로 “독자가 안다고 착각하게 만드는” 설명들이 아닐 수 없다.
조금 더 열심히 scholar를 뒤져보니 90년대에 visibility graph를 효율적으로 생성하는 방법들이 많이 발표된 것 같다. 그래서, 이 포스팅에서는 visibility graph를 생성하는 효율적인 방법을 알아볼 것이다. 무엇이 더 효율적으로 개선된 것인지 알려면 naive approach에 대한 학습도 선행되어야 하므로 naive approach 역시 적지 않은 지면을 할애할 것이다.
참고로, 이 포스팅에서 구현해 볼 “효율적인 생성 방법”은 아래의 서적을 참고하였다. 엄밀하게 이야기하면, 소개할 “효율적인 생성 방법”은 아래 서적에서 처음 제안된 것은 아니다. 이는 D.T Lee 라는 사람이 1990년대에 제출한 dissertation의 한 꼭지를 De Berg 씨가 보기 좋게 정리한 것이다. D.T Lee 씨의 dissertation은 visibility graph의 생성이 main contribution이 아니었을 뿐더러, 타자기로 출력된 문서를 스캔한 고문헌 (..?) 이기 때문에 De Burg 씨의 서적을 활용하기로 결정하였다.
- De Berg, Mark. Computational geometry: algorithms and applications. Springer Science & Business Media, 2000.
Table of contents:
- Visibility Graph
I. Import useful packages
Do not reinvent the wheel again이라는 격언을 따라 필자는 아래와 같이 유용한 패키지들을 마구마구 사용할 것이다. 물론, 아래의 패키지를 사용할 때 구현이 간편해지는 것 뿐이지 알고리즘의 핵심 아이디어를 패키지의 기능으로 대충 대체하는 짓은 하지 않을 것이다 (할 수도 없음).
import networkx as nx
import numpy as np
import math
import matplotlib.patches as patches
import matplotlib.pyplot as plt
import random
import shapely
from typing import Dict, List, Optional, Self, Tuple
EPS = 1e-3 # Error tolerance for some geometric operations.
II. Define helper functions
Visualization 및 evaluation을 위해서 아래와 같이 helper function들을 준비했다. 주석 때문에 얼핏보기에 길어보이지만 하는 일은 몹시나 자명하니 한번 쓱 읽고 넘기도록하자.
- 이 포스팅에서 다루는 알고리즘은 inner hole이 없고, disjoint한 polygon들이 주어진 경우를 가정한다. 그래서, world를 만들어 낼 때에 이러한 가정을 만족시키기 위한 코드들이 포함되어 있다.
- 구현의 편의를 위해 시작점과 도착점 (보통 robotics 문제에서는 존재하는) 은 생략하였다. Multi-polygon으로 이뤄진 world의 visibility graph를 구성했다면, 여기에 시작점과 도착점을 더하는 것 정도는 쉽게 할 수 있으리라.
def generate_square(len: float) -> shapely.Polygon:
"""Returns a square polygon that its width and length are `len`.
Args:
len (float): Length of a square.
Returns:
shapely.Polygon: Generated square centered at origin.
"""
return shapely.Polygon(
(
(len / 2, len / 2),
(len / 2, -len / 2),
(-len / 2, -len / 2),
(-len / 2, len / 2),
(len / 2, len / 2),
)
)
def rotate_and_translate(
g: shapely.geometry, theta: float, x: float, y: float
) -> shapely.geometry:
"""Rotates and then translates the given geometry `g`.
Args:
g (shapely.geometry): Geometry to be rotated and translated.
theta (float): Rotation angle (degree).
x (float): Translation along x-axis.
y (float): Translation along y-axis.
Returns:
shapely.geometry: Rotated and translated geometry.
"""
return shapely.affinity.translate(shapely.affinity.rotate(g, theta), x, y)
def segment_to_vector(ls: shapely.LineString) -> np.ndarray:
"""Converts a line segment to a vector.
Args:
ls (shapely.LineString): Line segment.
Returns:
np.ndarray: Direction vector of the line segment.
"""
return np.array(
[ls.coords[1][0] - ls.coords[0][0], ls.coords[1][1] - ls.coords[0][1]]
)
def is_cw(ls: shapely.LineString, p: shapely.Point) -> bool:
"""Returns true if `p` is on the clockwise side of `ls`.
Args:
ls (shapely.LineString): Linestring.
p (shapely.Point): Point.
Returns:
bool: True if clockwise
"""
return (
np.cross(
segment_to_vector(ls),
np.array([p.x - ls.coords[0][0], p.y - ls.coords[0][1]]),
)
< 0
)
def compute_acute_angle(p: shapely.Point, q: shapely.Point, r: shapely.Point) -> float:
"""Computes the acute angle between p, q, and r.
Args:
p (shapely.Point): Point p.
q (shapely.Point): Point q.
r (shapely.Point): Point r.
Returns:
float: Acute angle between p, q, and r.
"""
pq = np.array([q.x - p.x, q.y - p.y])
rq = np.array([q.x - r.x, q.y - r.y])
angle = math.atan2(np.cross(pq, rq), np.dot(pq, rq))
return abs(angle)
def generate_world(config: Dict) -> Dict[str, shapely.Geometry]:
"""Generates a world depicted by the given `config`.
Args:
config (Dict): Configuration of the world.
e.g.,
{
"seed" : 0,
"obstacles" : {
"number_of_squares" : 10,
"length_range" : (1.0, 5.0),
"theta_range" : (0.0, 360.0),
"x_range" : (10.0, 90.0),
"y_range" : (10.0, 90.0)
}
}
Returns:
Dict[str, shapely.Geometry]: Generated world.
e.g.,
{
"obstacles" : shapely.MultiPolygon,
}
"""
random.seed(config["seed"])
squares = [
rotate_and_translate(
generate_square(random.uniform(*config["obstacles"]["length_range"])),
random.uniform(*config["obstacles"]["theta_range"]),
random.uniform(*config["obstacles"]["x_range"]),
random.uniform(*config["obstacles"]["y_range"]),
)
for _ in range(config["obstacles"]["number_of_squares"])
]
union = shapely.union_all(squares)
if union.geom_type == "Polygon":
union = shapely.GeometryCollection((union))
polygons = []
for geom in union.geoms:
polygons.append(shapely.Polygon(geom.exterior.coords))
return {
"obstacles": shapely.MultiPolygon(polygons),
}
def draw_world(
world: Dict[str, shapely.Geometry],
graph: shapely.MultiLineString = shapely.MultiLineString(()),
):
"""Draws the given world and visibility graph.
Args:
world (Dict[str, shapely.Geometry]): World.
e.g.,
{
"obstacles" : shapely.MultiPolygon,
}
graph (shapely.MultiLineString): Edges of visibility graph.
"""
fig, ax = plt.subplots()
xmin, ymin, xmax, ymax = world["obstacles"].bounds
ax.set_xlim(xmin - 10, xmax + 10)
ax.set_ylim(ymin - 10, ymax + 10)
for obstacle in world["obstacles"].geoms:
ax.add_patch(
patches.Polygon(
obstacle.exterior.coords,
fc="green",
lw=1.0,
color="black",
ls="--",
alpha=0.5,
)
)
for edge in graph.geoms:
ax.plot(*edge.coords.xy, color="blue", lw=1.0)
ax.set_aspect("equal")
fig.tight_layout()
plt.show()
III. Generate an example world
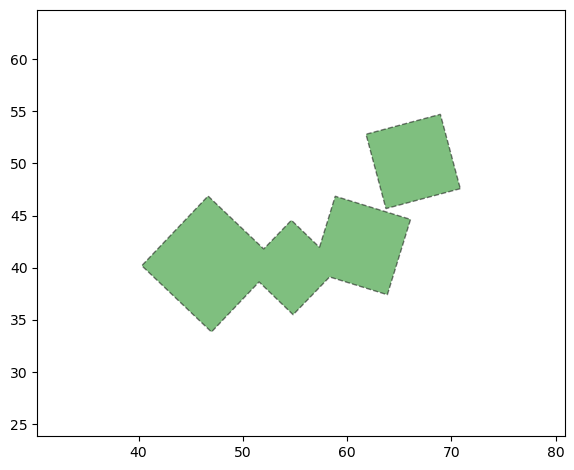
우선, 정의한 helper function들을 활용해서 아래와 같이 example world를 생성하고 그려보도록 하자. 의도한대로 잘 그려지는 것을 확인할 수 있다.
example_world = generate_world(
{
"seed": 0,
"obstacles": {
"number_of_squares": 4,
"length_range": (5.0, 10.0),
"theta_range": (0.0, 180.0),
"x_range": (30.0, 70.0),
"y_range": (30.0, 70.0),
},
}
)
draw_world(example_world)
IV. Implement naive algorithm
Naive approach를 일일히 설명하는 것은 비트 낭비다. 다만, 다른 기술 블로그나 문헌에서는 “꼭지점 A로 부터 꼭지점 B가 보이면 잇는다”와 같이 직관적인 설명만이 있기에 이들을 적절한 geometric 연산으로 치환하여 코드를 작성해둔다. 코드를 읽으면 의외로 “보인다는 조건이 왜 이렇게 표현되는 거지?” 하는 의문이 생길텐데 곰곰히 잘 생각해보기를 권한다.
def construct_visibility_graph_naively(
world: Dict[str, shapely.Geometry]
) -> List[shapely.LineString]:
"""Constructs a visibility graph using a naive algorithm.
Args:
world (Dict[str, shapely.Geometry]): World.
e.g.,
{
"obstacles" : shapely.MultiPolygon,
}
Returns:
List[shapely.LineString]: Edges of the generated visibility graph.
"""
polygons = world["obstacles"]
points = []
for polygon in polygons.geoms:
points.extend([shapely.Point(point) for point in polygon.exterior.coords[:-1]])
graph = []
for i in range(len(points)):
for j in range(i + 1, len(points)):
ls = shapely.LineString((points[i], points[j]))
if polygons.boundary.contains(ls) or ls.touches(polygons):
graph.append(ls)
return shapely.MultiLineString(graph)
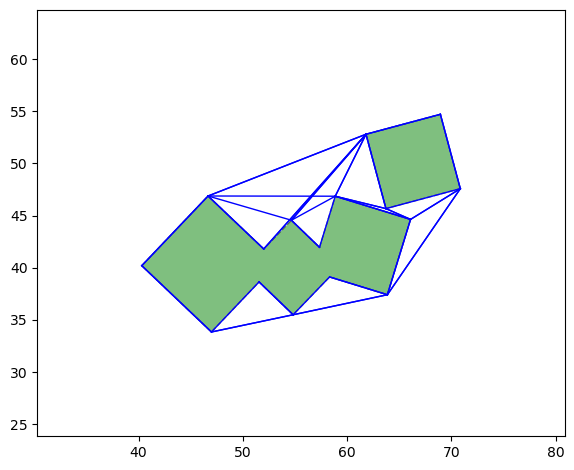
구현한 naive approach를 미리 생성해둔 example world에 적용하면 아래와 같은 결과를 얻을 수 있다. 제대로 잘 구현이 되었음을 알 수 있다.
V. D.T Lee’s approach
이제 본격적으로 효율적인 visibility graph 생성 알고리즘을 알아보자. D.T Lee의 아이디어를 잘 이해하려면 알고리즘의 전체 구조를 top-down으로 살펴보는 것이 좋다. 적어도 필자는 이 편이 조금 더 이해가 수월했다. 효율적인 알고리즘의 얼개는 아래의 construct_visibility_graph_efficiently와 같다.
def construct_visibility_graph_efficiently(
world: Dict[str, shapely.Geometry]
) -> List[shapely.LineString]:
"""Constructs a visibility graph using an efficient algorithm.
Args:
world (Dict[str, shapely.Geometry]): World.
e.g.,
{
"obstacles" : shapely.MultiPolygon,
}
Returns:
List[shapely.LineString]: Edges of the generated visibility graph.
"""
polygons = world["obstacles"]
polygon_graph = build_polygon_graph(polygons)
points = []
for polygon in polygons.geoms:
points.extend([shapely.Point(point) for point in polygon.exterior.coords[:-1]])
visibility_graph = []
for point in points:
for q in get_visible_points(point, polygon_graph, polygons):
visibility_graph.append(shapely.LineString((point, q)))
return shapely.MultiLineString(visibility_graph)
construct_visibility_graph_efficiently에는 아래 두개 함수가 등장한다:
build_polygon_graph(polygons)- 후술할 (효율적인) 알고리즘은 특정한 점에 연결된 다각형 변을 조회할 수 있어야하는 등 주어진 다각형 꼭지점의 연결관계를 관리해주어야 한다.
- 이것이 뭐 대단한 일이겠냐만, 필자의 경우
netwrokx패키지를 사용하여 연결관계를 그래프로 관리하였다. - Visibility graph를 만들면서 단지 다각형 꼭지점 간의 연결관계를 나타내기 위하여 그래프를 사용하는 점이 독자에게 혼란을 줄까 염려되어 필자는 이를 polygon graph로 네이밍해두었다.
get_visible_points(p, polygon_graph, polygons): 점p에서 다각형 집합 (정확히는 다각형 집합을 표현하는 polygon graph)polygon_graph에 대해 보이는 꼭지점들의 목록을 반환한다.- 이 함수가 D.T Lee 논문의 main contribution 이며, 이 과정의 복잡도가
O(NlgN)이 된다.
- 이 함수가 D.T Lee 논문의 main contribution 이며, 이 과정의 복잡도가
V.1. build_polygon_graph(polygons)
이 함수는 networkx 패키지를 사용해서 아래와 같이 간단히 구현할 수 있다.
def build_polygon_graph(polygons: shapely.MultiPolygon) -> nx.Graph:
"""Builds a graph of which the vertices are points, and the edges are the sides.
Args:
polygons (shapely.MultiPolygon): Obstacles.
Returns:
nx.Graph: A graph representing the polygons.
"""
id = 0
graph = nx.Graph()
for polygon in polygons.geoms:
offset = id
for i in range(len(polygon.exterior.coords) - 1):
graph.add_node(id, id=id, coord=shapely.Point(polygon.exterior.coords[i]))
id += 1
for i in range(len(polygon.exterior.coords) - 2):
graph.add_edge(offset + i, offset + i + 1)
graph.add_edge(offset, offset + len(polygon.exterior.coords) - 2)
return graph
V.2. get_visible_points(p, polygon_graph, polygons)
이제 get_visible_points(p, polygon_graph, polygons)의 구현에 대해서 살펴보자. 이 함수의 구현에 사용되는 D.T Lee의 아이디어는 꽤 복잡하기 때문에 몇 단계로 나누어 차근차근 설명할 것 이다.
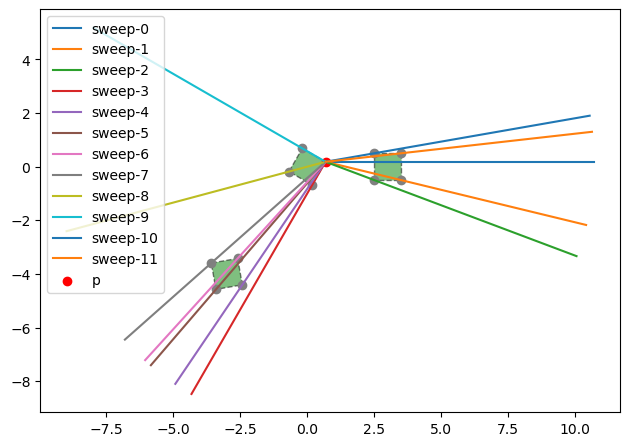
V.2.1. Sweep the plane using a half line in clockwise order
D.T Lee는 반직선 (i.e. sweep line) 을 통해 평면을 시계 방향으로 sweep한다. 아래 예제는 이것이 무슨 말인지를 보여주고 있다. sweep-{i} 따위로 표현되고 이있는 반직선들이 바로 그것인데, 최초의 수평 방향 (positive-x 방향으로 뻗는) 반직선부터 시작하여 시계 방향으로 sweep line을 차례로 바꾸어가며 평면을 훑는다. 최초의 sweep line을 제외하고는 모두 주어진 한 꼭지점 p로부터 다른 다각형의 꼭지점을 잇는 직선들이 sweep line으로 사용된다.
V.2.2. Manage candidate_sides
D.T Lee는 위에서 밝힌 방법대로 평면을 sweep하며 candidate_sides라는 자료구조를 관리한다. 이 자료구조는 점 p에서 다각형 집합 polygons에 대해 보이는 꼭지점을 조사함에 있어 확인해 볼 가치가 있는 다각형의 변들을 의미한다. 반대로 이야기하면, candidate_sides에 속하지 않는 다각형의 변들은 확인해볼 필요가 없다는 것이다. 대체 뭘 어떻게 관리하기에 이러한 마법이 가능한 것인지 알아보도록 하자.
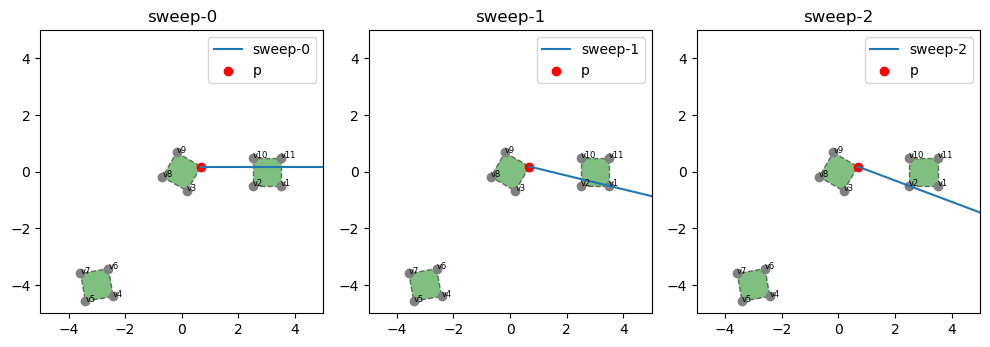
위의 그림은 첫번째, 두번째, 그리고 세번째 sweeping을 보이고 있다. sweep-0을 시작하기 전 최초의 상태에서는 candidate_sides는 비어있다. 이제 차례로 3번의 sweeping을 살펴보도록 하자.
sweep-0를 살펴보자.sweep-0은 일종의 initial condition으로서 점p에서 positive-x 방향으로 뻗는 sweep line을 사용한다.- 우선, 이 sweep line과 교차하는 다각형의 변들을 찾아
candidate_sides에 추가해준다. - 단, sweep line과 다각형의 변이 변의 끝점에서 교차하는 경우에는 추가하지 않는다.
- 그림의 예제에서는
v2-v10,v1-v11이 추가될 것이다.
sweep-1을 살펴보자.sweep-1은 점p와v1을 잇는 sweep line을 사용한다 (v1은sweep-0에서 사용한 sweep line에 대해 바로 다음 시계 방향에 위치하는 점임).candidate_sides에 속한 변들과 sweep line이v1이 아닌 곳에서 교점을 갖는지 확인한다.- 교점이 있다면,
p에서v1은 보이지 않는다 (반대로 교점이 없다면 보이는 것임). - 그림의 예제에서는 sweep line이
candidate_sides에 속한v2-v10과 교점을 갖으므로p에서v1은 보이지 않는다.
- 교점이 있다면,
- 교점의 확인이 끝나면,
v1을 포함하는 두 변을 조사한다.- 두개의 변 중 sweep line을 기준으로 반시계 방향에 위치하는 변은
candidate_sides에서 삭제한다. - 두개의 변 중 sweep line을 기준으로 시계 방향에 위치하는 변은
candidate_sides에서 추가한다. - 그림의 예제에서는
v1-v2가candidate_sides에 추가되고,v1-v11이candidate_sides에서 삭제된다.
- 두개의 변 중 sweep line을 기준으로 반시계 방향에 위치하는 변은
sweep-2를 살펴보자 (sweep-1과 동일한 과정이니 결과만 기술함).sweep-2은 점p와v2을 잇는 sweep line을 사용한다.candidate_sides에 속한 변들과 sweep line이v2가 아닌 곳에서 교점을 갖는지 확인한다.- 그림의 예제에서는 sweep line과
candidate_sides에 속한 변들과의 교점은 모두v2이므로 (교점을 갖지 않아)p에서v2가 보인다.
- 그림의 예제에서는 sweep line과
v2에 인접한 두개의 변을 조사한다.v1-v2,v2-v10이candidate_edges에서 삭제된다 (추가되는 변은 없음).
V.2.3. Implement candidate_sides as a binary tree
V.2.2 에서 관찰할 수 있는 흥미로운 사실이 있다. 그것은 sweep line과 candidate_sides내 다각형 변들의 교차 여부를 헤아릴 때 굳이 모든 변들을 다 검사할 필요가 없다는 점이다.
만약 candidate_sides에 있는 변들이 직전 sweep line에서의 교점 순서대로 사전에 정렬되어 있다고 가정해보자. “교점 순서대로” 라는 표현이 조금 혼란스러울 것 같다. 이는 단순히 sweep line 상에서 교점까지의 거리가 보다 가까운 변을 보다 앞에 저장한다는 의미이다. 예를 들어, sweep-0에서 v2-v10, v1-v11 중 누가 더 sweep line과 먼저 교차하는가? v2-v10이므로 candidate_sides에는 v2-v10을 v1-v11보다 앞에 저장한다는 의미이다.
이제 머리속으로 sweep line을 sweep-0에서 sweep-1으로 이동해보자 (필자는 헬리콥터 프로펠러를 상상했음). 주어진 다각형의 변들은 서로 교차 (꼭지점에서 만나는 것은 제외) 하자 않으므로 sweep line의 sweep 중에 sweep-0 에서 만들어 놓은 순서는 유지될 것이다. 즉, 교점의 위치는 바뀌겠지만 교점 간의 위상(..?)은 변경되지 않는다는 이야기이다.
따라서, sweep-1에서 v1의 visibility를 판단할 때는 sweep line과 v2-v10 (candidate_sides의 가장 앞 원소)의 교차 여부만을 확인해주면 된다. 이는 앞에 저장되어 있는 다각형의 변과는 교점을 갖지 않았는데, 뒤에 저장되어 있는 다각형의 변과는 교점을 갖는 것은 불가능하기 때문이다.
여기까지 읽으면 스멀스멀 감이온다. candidate_sides는 binary tree 형태로 관리하기 몹시 적절한 자료구조이다! 다만, 각 노드가 고정된 key 값을 갖지 않고, sweep line 상 교점의 위상을 기준으로 정렬되므로 구현이 대단히 까다롭다. 필자는 이를 아래와 같이 구현하였다.
class Side:
"""A class representing a side of a polygon (i.e, binaty tree node)."""
def __init__(self, src_id: int, dst_id: int, polygon_graph: nx.Graph):
"""C'tor.
Args:
src_id (int): ID of source vertex.
dst_id (int): ID of destination vertex.
polygon_graph (nx.Graph): A graph representing polygons.
"""
if src_id > dst_id:
self.__init__(dst_id, src_id, polygon_graph)
return
self.src_id = src_id
self.dst_id = dst_id
self.side = shapely.LineString(
(polygon_graph.nodes[src_id]["coord"], polygon_graph.nodes[dst_id]["coord"])
)
self.left = None
self.right = None
def is_equal(self, rhs: Self) -> bool:
"""Returns whether the `rhs` is equals to `self`.
Args:
rhs (Self): A side.
Returns:
bool: True if `self` and `rhs` are equal.
"""
return self.src_id == rhs.src_id and self.dst_id == rhs.dst_id
def is_less_equal(self, sweep_line: shapely.LineString, rhs: Self) -> bool:
"""Returns whether `self <= rhs` on the given `sweep_line`.
Args:
sweep_line (shapely.LineString): A sweep line.
rhs (Self): A side.
Returns:
bool: Whether `self <= rhs` on the given `sweep_line`.
"""
if self.is_equal(rhs):
return True
def get_intersection(
side: shapely.LineString, sweep_line: shapely.LineString
) -> Tuple[Optional[float], Optional[shapely.Point]]:
p = sweep_line.coords[0]
min_length = None
min_intersection = None
intersections = sweep_line.intersection(side, grid_size=EPS)
if intersections.geom_type == "MultiLineString":
for g in intersections.geoms:
for intersect in g.coords:
intersect = shapely.Point(intersect)
length = intersect.distance(shapely.Point(p))
if min_length is None or length < min_length:
min_length = length
min_intersection = intersect
else:
for intersect in intersections.coords:
intersect = shapely.Point(intersect)
length = intersect.distance(shapely.Point(p))
if min_length is None or length < min_length:
min_length = length
min_intersection = intersect
return min_length, min_intersection
length_self, intersection_self = get_intersection(self.side, sweep_line)
length_rhs, intersection_rhs = get_intersection(rhs.side, sweep_line)
if abs(length_self - length_rhs) > EPS:
return length_self <= length_rhs
self_end = (
self.side.coords[0]
if shapely.Point(self.side.coords[1]).distance(
shapely.Point(intersection_self)
)
< EPS
else self.side.coords[1]
)
rhs_end = (
rhs.side.coords[0]
if shapely.Point(rhs.side.coords[1]).distance(
shapely.Point(intersection_rhs)
)
< EPS
else rhs.side.coords[1]
)
return compute_acute_angle(
shapely.Point(sweep_line.coords[0]),
shapely.Point(intersection_self),
shapely.Point(self_end),
) <= compute_acute_angle(
shapely.Point(sweep_line.coords[0]),
shapely.Point(intersection_self),
shapely.Point(rhs_end),
)
class CandidateSides:
"""A class for candidate sides (i.e., binary tree)."""
def __init__(self):
"""C'tor."""
self.root = None
def get_min(self) -> Optional[Side]:
"""Gets the minimum side.
Returns:
Side: The minimum side.
"""
return self._get_min(self.root)
def _get_min(self, root: Optional[Side]) -> Optional[Side]:
"""Gets the minimum side from a tree rooted at `root`.
Args:
root (Optional[Side]): A root.
Returns:
Optional[Side]: The minimum side.
"""
if root is not None and root.left is not None:
return self._get_min(root.left)
else:
return root
def get_max(self) -> Optional[Side]:
"""Gets the maximum side.
Returns:
Side: The maximum side.
"""
return self._get_max(self.root)
def _get_max(self, root: Optional[Side]) -> Optional[Side]:
"""Gets the maximum side from a tree rooted at `root`.
Args:
root (Optional[Side]): A root.
Returns:
Optional[Side]: The maximum side.
"""
if root is not None and root.right is not None:
return self._get_max(root.right)
else:
return root
def insert(self, sweep_line: shapely.LineString, side: Side) -> Side:
"""Inserts a side to the tree.
Args:
sweep_line (shapely.LineString): A sweep line.
side (Side): A side to insert.
Returns:
Side: A root of inserted tree.
"""
self.root = self._insert(sweep_line, self.root, side)
return self.root
def _insert(
self, sweep_line: shapely.LineString, root: Optional[Side], side: Side
) -> Side:
"""Inserts a side to the tree.
Args:
sweep_line (shapely.LineString): A sweep line.
root (Optional[Side]): A root.
side (Side): A side to insert.
Returns:
Side: A root of inserted tree.
"""
if root is None:
root = side
elif side.is_less_equal(sweep_line, root):
root.left = self._insert(sweep_line, root.left, side)
else:
root.right = self._insert(sweep_line, root.right, side)
return root
def delete(self, sweep_line: shapely.LineString, side: Side) -> Optional[Side]:
"""Deletes a side from the tree.
Args:
sweep_line (shapely.LineString): A sweep line.
side (Side): Side to delete.
Returns:
Optional[Side]: A root of deleted tree.
"""
self.root = self._delete(sweep_line, self.root, side)
return self.root
def _delete(
self, sweep_line: shapely.LineString, root: Optional[Side], side: Side
) -> Optional[Side]:
"""Deletes a side from the tree.
Args:
sweep_line (shapely.LineString): A sweep line.
root (Optional[Side]): A root.
side (Side): Side to delete.
Returns:
Optional[Side]: A root of deleted tree.
"""
if root is None:
return None
elif root.is_equal(side):
if root.left is None:
return root.right
elif root.right is None:
return root.left
else:
max_side = self._get_max(root.left)
root.src_id = max_side.src_id
root.dst_id = max_side.dst_id
root.side = max_side.side
root.left = self._delete(sweep_line, root.left, max_side)
return root
elif root.is_less_equal(sweep_line, side):
root.right = self._delete(sweep_line, root.right, side)
return root
else:
root.left = self._delete(sweep_line, root.left, side)
return root
def traverse(self):
"""Inorder traverse."""
self._traverse(self.root)
def _traverse(self, root: Optional[Side], level: int = 0):
"""Inorder traverse of the tree rooted at `root`.
Args:
root (Optional[Side]): A root.
level (int): Level of the root.
"""
depth = ""
for _ in range(level + 3):
depth += " "
if root is None:
print(depth + "NULL")
return
self._traverse(root.left, level + 1)
print(f"{depth}: {root.src_id} -> {root.dst_id}")
self._traverse(root.right, level + 1)
V.2.4. Implement get_visible_points(p, polygon_graph, polygons)
이전 챕터들을 통해서 D.T Lee의 알고리즘에 대한 아이디어를 설명하였고, 핵심이 되는 이진트리 자료구조를 구현하였다. 이제 모든 준비물 (..?) 이 모였으니 get_visible_points(p, polygon_graph, polygons)를 구현해보자.
def get_visible_points(
p: shapely.Point, polygon_graph: nx.Graph, polygons: shapely.MultiPolygon
) -> shapely.MultiPoint:
"""Returns points that are visible from `p`.
Args:
p (shapely.Point): A point.
polygon_graph (nx.Graph): A polygon graph.
polygons (shapely.MultiPolygon): Obstacles.
Returns:
shapely.MultiPoint: Visible points.
"""
def my_atan2(p: shapely.Point, q: shapely.Point) -> float:
theta = math.atan2(q.y - p.y, q.x - p.x)
theta = -theta if theta <= 0 else 2 * math.pi - theta
return theta
# Sort vertices by clockwise order.
nodes = []
for n in polygon_graph.nodes:
if p.distance(polygon_graph.nodes[n]["coord"]) > EPS:
nodes.append(polygon_graph.nodes[n])
nodes.sort(
key=lambda q: (
my_atan2(p, q["coord"]),
math.hypot(q["coord"].x - p.x, q["coord"].y - p.y),
)
)
def make_sweep_line(
p: shapely.Point, q: shapely.Point, length: float = 1e3
) -> shapely.LineString:
dir = np.array([q.x - p.x, q.y - p.y])
dir *= length / np.linalg.norm(dir)
return shapely.LineString((p, (p.x + dir[0], p.y + dir[1])))
# Plane sweep.
candidates = CandidateSides()
# Initial sweep (positive x-axis direction).
sweep_line = make_sweep_line(p, shapely.Point(p.x + 1, p.y))
for src_id, dst_id in polygon_graph.edges:
src = polygon_graph.nodes[src_id]["coord"]
dst = polygon_graph.nodes[dst_id]["coord"]
ls = shapely.LineString((src, dst))
if sweep_line.crosses(ls):
candidates.insert(sweep_line, Side(src_id, dst_id, polygon_graph))
# Sweep in the clockwise order.
visible_points = []
for node in nodes:
sweep_line = make_sweep_line(p, node["coord"])
min_side = candidates.get_min()
ls = shapely.LineString((p, node["coord"]))
if min_side is None and not polygons.contains(ls):
visible_points.append(node["coord"])
elif not polygons.contains(ls):
intersections = sweep_line.intersection(min_side.side, grid_size=EPS)
if intersections.geom_type != "MultiLineString":
intersections = intersections.coords
if len(intersections) == 0:
visible_points.append(node["coord"])
elif (
len(intersections) == 1
and shapely.Point(intersections[0]).distance(node["coord"]) < EPS
):
visible_points.append(node["coord"])
for neighbor in polygon_graph.neighbors(node["id"]):
side = Side(node["id"], polygon_graph.nodes[neighbor]["id"], polygon_graph)
if is_cw(sweep_line, polygon_graph.nodes[neighbor]["coord"]):
candidates.insert(sweep_line, side)
else:
candidates.delete(sweep_line, side)
return visible_points
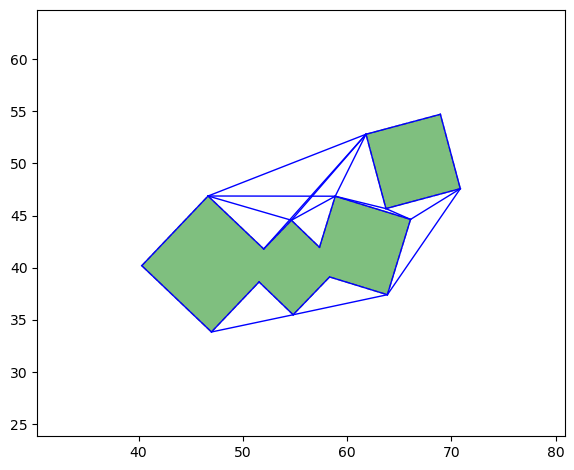
구현한 알고리즘을 helper function들을 이용해서 그려보면 아래와 같이 naive approach와 동일한 결과를 얻을 수 있다.