Configuration Space I
Keywords: Configurtaion Space, Degree of Freedom, Grubler's Formula
I. Configuration
Configuration은 robot을 이루는 모든 point들에 대한 위치를 나타내는 specification이다. 예를들어, 2D planar robot의 경우 \((x, y, theta)\), 3D spatial robot의 경우 \((x, y, z, roll, pitch, yaw)\)가 될 수 있다.
II. Degree of Freedom(DoF)
사실 그 동안 내가 보아온 robot들은 깊게 생각해보지 않아도 “아, 이거 X-자유도네!”같이 말할 수 있을 정도로 단순한 형태들이었다. 그래서, DoF라는 개념이 이렇게 심오하게 정의되는 것인지 처음 알게되었다. Textbook 및 lecture를 살펴보면 아래와 같이 여러가지 방법으로 정의해볼 수 있을 것 같다.
- Robot의 configuration을 나타내기 위해 필요한 최소한의 실수 갯수
- Configuration space의 dimension
- \(\sum freedom \, of \, bodies - \# \, of \, independent \, constraints\)
세번째 정의를 잘 받아들이는 것이 중요하다. 굳이 “이해하는 것”이라는 표현보다 “받아들이는 것”이라는 표현을 쓴 데에는 textbook의 동전 예제에 대한 당위성(?)을 나조차도 아직 충분히 헤아리지 못했기 때문이다. 일단 받아들임으로서 아래 III절의 typical robot joints를 보다 순조롭게 이해할 수 있다.
III. Robot Joints
살피고 있는 textbook, lecture에서 등장하는 robot들은 N개의 body와 link들을 연결하는 joint들로 이루어져 있다고 한다. 그리고, 아래는 robot에서 자주 사용되는 joint들을 정리해놓은 것이다.
- Robotics에서는 body를 link라고 부르고, 통상 지면도 link로 친다고 한다.
- 일단 당분간은 1개의 joint는 항상 2개의 link를 연결하는 것으로 가정한다.
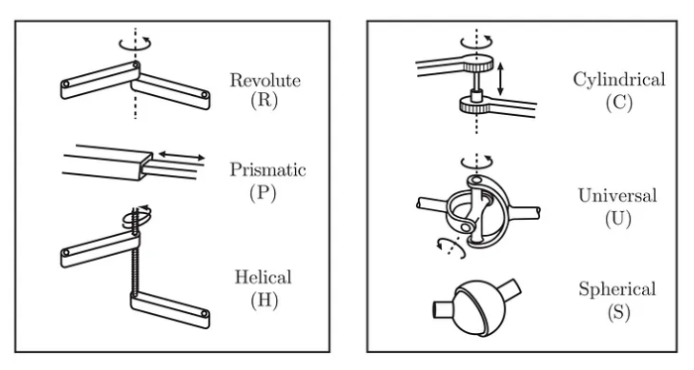
일단, 바보가 아니라면 위의 그림에 예시된 joint들의 dof는 쉽게 생각해낼 수 있다. 따라서, 아래 표의 dof 열은 쉽게 채워넣을 수 있을 것이다. # of constraints 열들이 조금 생소할 수 있는데, II절에서 dof를 \(\sum freedom \, of \, bodies - \# \, of \, independent \, constraints\)로도 정의할 수 있었던 것을 떠올려보자.
예를들어, 두 개의 spatial link A, B를 연결하는 spherical joint를 생각해보자.
- Joint 없이 A, B가 따로 존재할 때 A에 대해서 B는 100% 자유롭게 위치할 수 있으므로 \(\sum freedom \, of \, bodies = 6\)이다(A를 기준점으로 고정시켜서 논의하므로 12가 아님에 주의하자).
- 이제, joint를 달았는데 이 joint의 dof가 3이라는 것은 우리가 상식적으로 알고 있다.
- “아! 그럼 이 joint를 달면서 \(\# \, of \, independent \, constraints = 3\)이 생겨났구나”라고 생각할 수 있다(\(dof = \sum freedom \, of \, bodies - \# \, of \, independent \, constraints\)이므로).
| joint type | dof | # of constraints btw planar links | # of constraints btw spatial links |
|---|---|---|---|
| revolute | 1 | 2 | 5 |
| prismatic | 1 | 2 | 5 |
| helical | 1 | N/A | 5 |
| cylindrical | 2 | N/A | 4 |
| universal | 2 | N/A | 4 |
| spherical | 3 | N/A | 3 |
IV. Grubler’s Formula
어떻게 발음하는 것인지 모르겠는 사람의 이 공식은 link 갯수, joint 타입/갯수등을 딱 넣어주면 robot이 얼마의 dof를 갖는지 알려주는 아주 신박한 공식이다. 일단 아래와 같이 notation을 정의하자.
- \(N\): 지면을 포함한 link의 수
- \(m\): 각 link의 dof(자명하게, planar robot이면 2, spatial robot이면 3)
- \(J\): Joint의 수
- \(f_i\): i번째 joint의 dof
- \(c_i\): i번째 joint의 constraint 수
이때 dof는 아래와 같이 정의된다.
\[\begin{align*} dof & = m(N - 1) - \sum_{1}^{J} c_i \\ & = m(N - 1) - \sum_{1}^{J} (m - f_i) \\ & = m(N - 1 - J) + \sum_{1}^{J} f_i \end{align*}\]이 공식의 강력한 점은 언뜻보기에 몹시 복잡하게 생긴 로봇의 dof도 무지성으로 계산해낼 수 있다는 점이다. 가령 lecture에 등장하는 어떤 미친놈이 만들었나 싶은 아래의 Stewart-Gough Platform은 dof가 6임을 공식 1번으로 알아낼 수 있다.
Stewart-Gough Platform은 총 14개 link, 6개의 universal joint, 6개의 prismatic joint, 6개의 spherical joint로 이루어져 있다. 공식에 그대로 대입해주면, \(dof = 6(14-1-18)+2 \cdot 6 + 1 \cdot 6 + 3 \cdot 6 = 6\)을 얻을 수 있다.