Graham’s Scan
Keywords: Graham's Scan, Convex Hull
Graham's scan은 2D 평면상에 주어진 N개의 점들을 모두 포함하는 convex polygon을 찾는 알고리즘이다. 주어진 모든 점을 포함하는 convex polygon은 convex hull이라고 불린다.
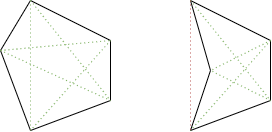
convex polygon다각형 \(P\)에서 서로 다른 임의의 두 꼭지점을 골라 이를 잇는 선분 \(L\)을 만든다고 하자. 선분 \(L\) 위의 모든 점이 \(P\)의 내부(경계 포함)에 있는 경우 \(P\)는 convex polygon이다. 예를 들어, 아래 그림의 좌측 polygon은 convex polygon이고 우측 polygon은 convex polygon이 아니다. 우측 polygon에서 적색 점선 위에 있는 점들은 polygon 내부에 위치하고 있지 않음을 알 수 있다.
I. Intuition of Graham’s Scan
이 문제를 아주 직관적으로 푸는 알고리즘은 Gift wrapping algorithm이다. Graham's scan은 Gift wrapping algorithm에 정렬과 스택을 추가적으로 도입함으로써 복잡도를 개선하였다. 따라서, Graham's scan의 이해에 직관을 부여해 줄 수 있는 Gift wrapping algorithm의 동작과정을 우선 살펴보도록하자.
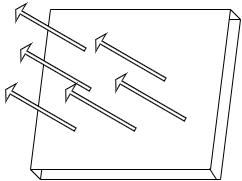
머릿속에 아래 그림과 같이 널빤지에 촘촘히 박혀있는 못들을 생각해보자. 그리고, “널빤지가 곧 2D 평면이요, 못들이 곧 점이니”라고 자기 암시를 해보도록 하자. 이제 우리에게 주어진 미션은 못들을 모두 포함하는 convex hull을 찾는 것이다.
아마 가장 직관적인 접근은 아래와 같을 것이다. 그리고 이것이 곧 Gift wrapping algorithm의 접근 방법이기도 하다.
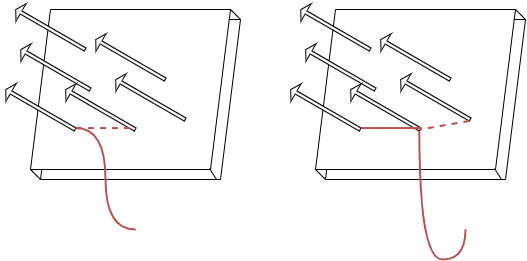
- 무조건 convex hull에 포함될 수 밖에 없는 못 하나를 고른다. 가장 좌측 하단에 있는 못 정도를 고르면 무리가 없을 것이다(이 못을 안 고르면 이 못을 포함시킬 방법이 없으므로).
- 위에서 고른 못에 실을 묶는다.
- 반시계 방향으로 당기면서 가장 먼저 만나는 못에 또 실을 감는다.
- 맨 처음 고른 못을 만날 때까지 위의 과정을 반복한다.
아래 그림은 위에서 설명한 과정을 그림으로 나타낸 것이다.
“
가장 먼저 만나는 못“이라는 표현이 조금은 혼란스러울 수 있을 것 같다. 이 표현은 다음과 같이 조금 더 formal하게 표현해줄 수 있다.
- 실이 감겨 있는 마지막 못을 \(P_{last}\)라고 하자.
- 실이 감겨 있지 않은 못을 \(\{P_{0}, P_{1}, ...\}\)라고 하자.
- \(P_{last} \rightarrow P_{n} \ (n \geq 0)\)이 x축(i.e. 수평축)과 이루는 각도가 최소가 되는 못을 찾는다. 이 때, 각도는 시계 방향에는 음수를, 반시계 방향에는 양수를 부여한다.
Gift wrapping algorithm을 살펴보는 것을 통해 Graham's scan을 이해하기 위한 inituition은 부여가 된 것 같다. 결국에는 “greedy하게(?) 최대한 밖에 있는 점부터 감싼다”가 핵심이다.
II. Graham’s Scan
이제, Gift wrapping algorithm의 수행시간을 정렬과 스택을 도입하여 해결한 Graham's scan을 살펴보자. 예제를 가지고 한 스텝, 한 스텝 진행해보면 I절에서 이야기한 inituition을 그대로 옮긴 것을 알 수 있다.
-
우선, 무조건 convex hull에 포함될 점 하나를 고른다. 적당히 최외곽(좌/우 상/하단)에 있는 점을 고르면 된다. 아래 예시에서는 최좌상단에 있는 점을 골랐다.
-
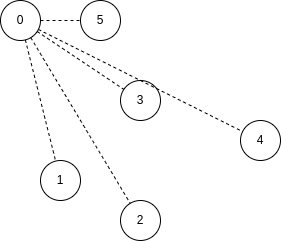
고른 점을 기준으로 나머지 점들을 반시계 방향으로 이루는 각이 작은 순서대로 정렬한다. 조금 더 formal하게 표현하면, 고른 점을 \(P\), 나머지 점들을 \(P_{i}\)라고 할 때, “\(P \rightarrow P_{i}\)가 x축과 이루는 각이 작은 순서대로 정렬한다.” 정도가 될 수 있다. 정렬하면, 아래 예시와 같이 점들에 순서가 부여될 것이다(이해를 돕기위해 점선으로 각들을 표현해두었다).
-
정렬된 점들에서, 첫 2개의 점을 차례로 스택에 push해준다.
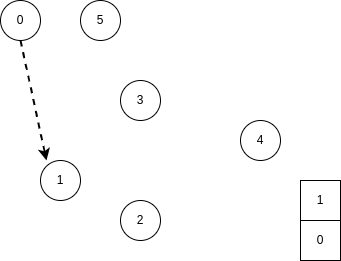
- 이제, 나머지 정렬된 점들을(i.e. 2번 부터) 차례로 순회하면서 아래를 진행한다. 기술의 편의를 위해 \(S_{curr}\)는 스택의 top을, \(S_{prev}\)는 스택의 top 바로 아래 원소를 가르킨다고 하자.
- 이번에 보고 있는 점을 \(P_{i}\)라고 하자.
- 만약, 스택의 원소 수가 2개 미만이라면, \(P_{i}\)는 무조건 스택에 push하고 \(P_{i+1}\)을 검사하러 간다.
- 스택의 원소 수가 2개 이상이라면, \(S_{prev} \rightarrow S_{curr}\)이 나타내는 line 기준으로 \(P_{i}\)가 어느 방향(반시계 혹은 시계)에 있는지를 검사한다.
- 만약 반시계 방향에 있다면, \(P_{i}\)를 스택에 push하고, \(P_{i+1}\)을 검사하러 간다.
- 만약 시계 방향에 있다면, 스택에서 \(S_{curr}\)을 pop하고, 다시 \(P_{i}\)를 검사한다.
- 더 이상 검사할 점 \(P_{i}\)가 남아있지 않을 때까지 반복한다.
- 마지막에, 스택에 남아 있는 정점들이 convex hull polygon의 꼭지점들이 된다.
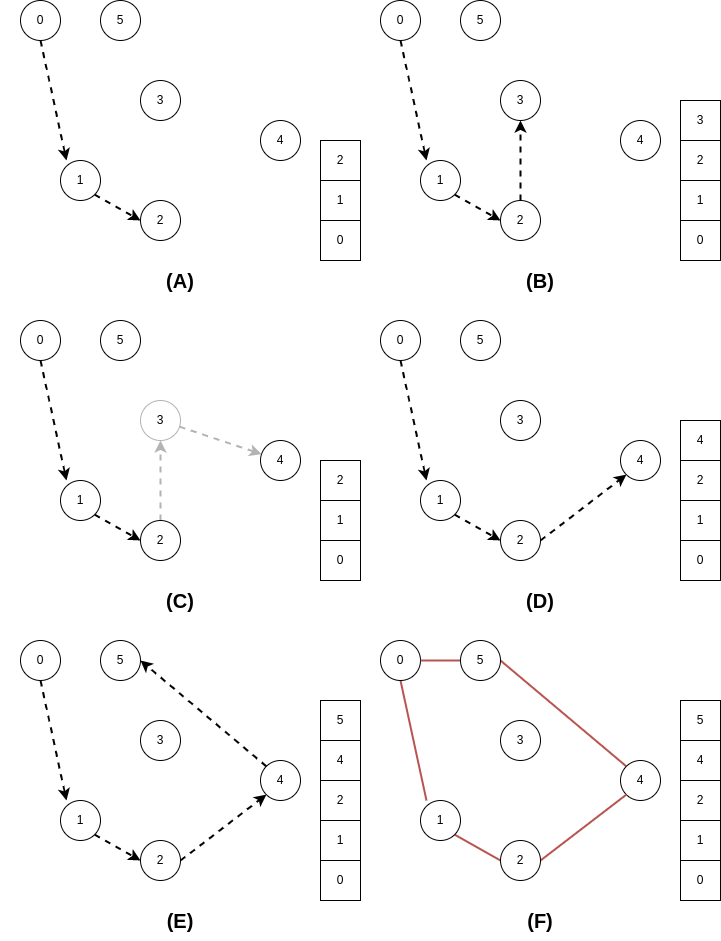
바로 위에서 언급한 부분을 그림으로 나타내면 아래와 같다.
- (A), (B), (D), (E)에서는 보고 있는 정점이 반시계 방향에 있어서 스택에 push되었고,
- (C)에서는 시계 방향에 있어 스택에서 직전 점이 pop되었다.
- 더 이상 검사할 정점이 없는 (F)상태가 되면, 스택에 남아있는 점들이 convex hull polygon의 꼭지점이 되는 것을 알 수 있다.